The principle of Variable Reluctance Stepper Motor is based on the property of the flux lines which capture the low reluctance path. The stator and the rotor of the motor are aligned in such a way that the magnetic reluctance is minimum. There are two types of the Variable Reluctance Stepper Motor. They are as follows
Working of a Variable Reluctance Stepper Motor
A four phase stepper motor or (4/2 pole), single stack variable reluctance stepper motor is shown below. Here, (4/2 pole) means that the stator has four poles and the rotor has two poles.
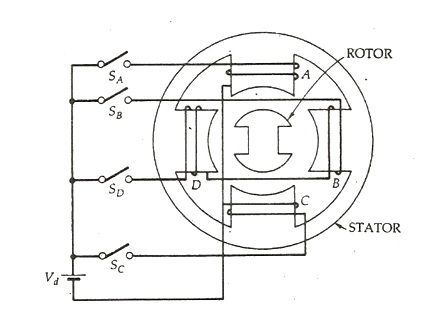
The four phases A, B, C and D are connected to the DC source with the help of a semiconductor, switches SA, SB, SC and SD respectively as shown in the above figure. The phase windings of the stator are energized in the sequence A, B, C, D, A. The rotor aligns itself with the axis of phase A as the winding A is energized. The rotor is stable in this position and cannot move until phase A is de-energized.
Now, the phase B is excited and phase A is disconnected. The rotor moves 90 degrees in the clockwise direction to align with the resultant air gap field which lies along the axis of phase B. Similarly the phase C is energized, and the phase B is disconnected, and the rotor moves again in 90 degrees to align itself with the axis of the phase
Thus, as the Phases are excited in the order as A, B, C, D, A, the rotor moves 90 degrees at each transition step in the clockwise direction. The rotor completes one revolution in 4 steps. The direction of the rotation depends on the sequence of switching the phase and does not depend on the direction of the current flowing through the phase. Thus, the direction can be reversed by changing the phase sequence like A, D, C, B, A.
The magnitude of the step angle of the variable reluctance motor is given as
Where,
- α is the step angle
- ms is the number of stator phases
- Nr is the number of rotor teeth
The step angle is expressed as shown below.
Where, NS is the stator poles
The step angle can be reduced from 90 degrees to 45 degrees in a clockwise direction by exciting the phase in the sequence A, A+B, B, B+C, C, C+ D, D, D+A, A.
Similarly, if the sequence is reversed as A, A+D, D, D+C, C, C+B, B, B+A, A, the rotor rotates at step angle of 45 degrees in the anticlockwise direction.
Here, (A+B) means that the phase windings A and B both are energized together. The resultant field is the midway of the two poles. i.e. it makes an angle of 45 degrees with the axis of the pole in the clockwise direction. This method of shifting excitation from one phase to another is known as Microstepping.By using Stepper Motor, lower values of the step angle can be obtained with numbers of poles on the stator.
Consider a 4 phase, (8/6 pole) single stack variable reluctance motor shown in the figure below.
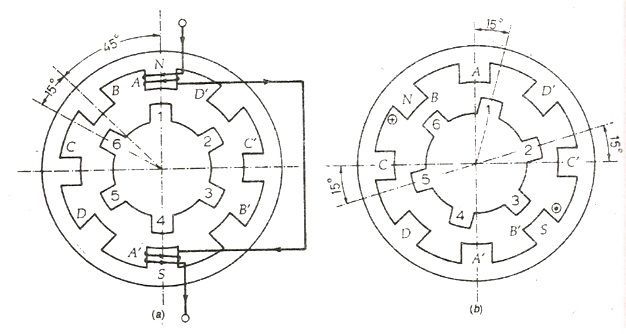
The opposite poles are connected in series forming a 4 phases. The rotor as 6 poles. Here I am considering only phase A to make the connection simple. When the coil AA’ is excited the rotor teeth 1 and 4 are aligned along the axis of the winding of the phase A. Thus, the rotor occupies the position as shown in the above figure (a).
Now, the phase A is de-energized, and the phase winding B is energized. The rotor teeth 3 and 6 get aligned along the axis of phase B. The rotor moves a step of phase angle of 15 degrees in the clockwise direction. Further, the phase B is de-energized, and the winding C is excited. The rotor moves again 15⁰ phase angle.
The sequence A, B, C, D, A is followed, and the four steps of rotation are completed, and the rotor moves 60 degrees in clockwise direction. For one complete revolution of the rotor 24 steps are required. Thus, any desired step angle can be obtained by choosing different combinations of the number of rotor teeth and stator exciting coils.
没有评论:
发表评论